









 218 / 324
218 / 324

.
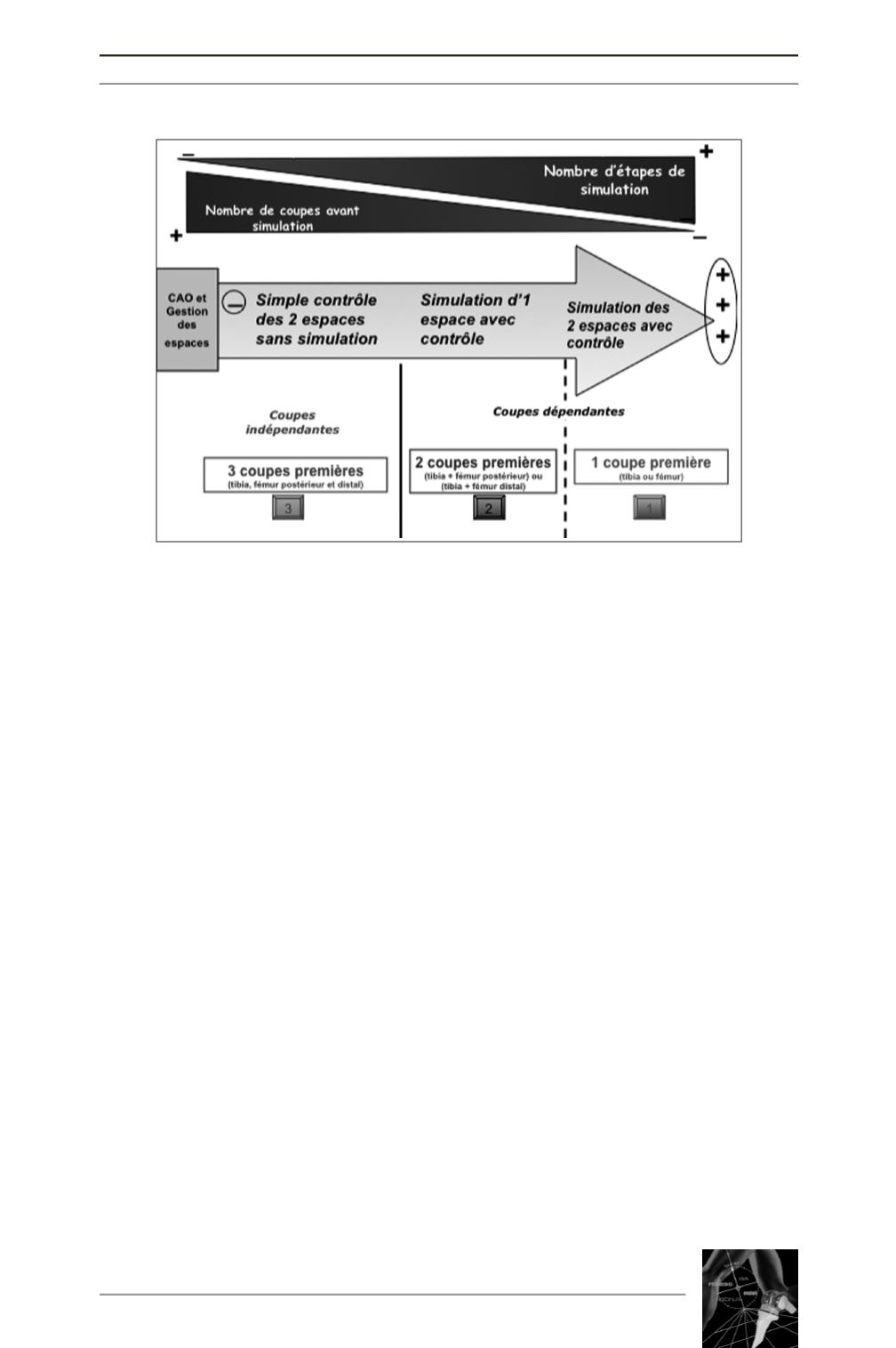
Certains systèmes
permettent une troisième
voie de coupe dépendante avec simulation [8]
elle permet de ne faire qu’une coupe et de
simuler ensuite (selon les mêmes principes)
les 2 autres coupes et la balance ligamentaire.
Dans ce cas, les étapes de simulations sont vir-
tuelles et permettent “sans avoir coupé” pour
une enveloppe ligamentaire donnée de
connaître le positionnement 3D des implants.
Des gestes de libération ligamentaire peuvent
alors être menés sous contrôle informatique
jusqu’à ce que le meilleur compromis soit obte-
nu entre les coupes et les gestes d’équilibrage
ligamentaires qui sont alors étroitement liés.
Les systèmes de navigation doivent permettre
de simuler, de contrôler et de naviguer les
coupes et les gestes de libération ligamentaire
pour mieux prévoir et mieux gérer l’anatomie
des espaces prothétiques en flexion et en
extension.
Notons que, si la navigation permet de mieux
contrôler les gestes de libération ligamentaire,
elle ne résout pas le problème de la mise en
tension des tissus mous (par un scaper, un dis-
tracteur ou un tenseur) et de la quantification
peu reproductible du stress que l’opérateur
applique sur l’enveloppe ligamentaire au
moment de son geste.
Anatomie ligamentaire et niveau
d’interligne/Anatomie et contrôle de
longueur du membre inférieur
Plusieurs auteurs dont Chatain [9] ont bien
montré l’importance de la restitution d’un
niveau d’interligne articulaire anatomique
dans la cinématique articulaire. La navigation
permet de contrôler à tout moment le niveau
d’interligne et la longueur du membre par
mesure des segments fémoral et tibial.
LA NAVIGATION PEUT-ELLE AIDER À RESTITUER L’ANATOMIE DANS LES PTG
217
Fig. 6 : La navigation une autre vision de l’anatomie des espaces et des coupes