









 43 / 324
43 / 324

14
es
JOURNÉES LYONNAISES DE CHIRURGIE DU GENOU
42
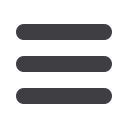
Fig. 1 : Mesures angulaires réalisées.
Angle HKA (angle fémoro-tibial méca-
nique Hip-Knee-Ankle): angle médial
entre les axes Z du Référentiel Fémur
(RF) et du Référentiel Tibia (RT). Angle
HKS (divergence anatomo-mécanique
fémorale Hip-Knee-Shaft): angle entre
l’axe Z du RF et l’axe anatomique distal
fémoral (axe centré sur le tiers distal de
la diaphyse fémorale). Angle AFM
(Angle Fémoral Mécanique): angle
médial entre l’axe Z du RF et l’axe arti-
culaire distal fémoral (axe reliant le
point le plus distal de chaque condyle
fémoral). Angle ATM (Angle Tibial
Mécanique): angle médial entre l’axe Z
du RT et l’axe articulaire proximal tibial
(axe reliant le barycentre de chaque
plateau tibial).
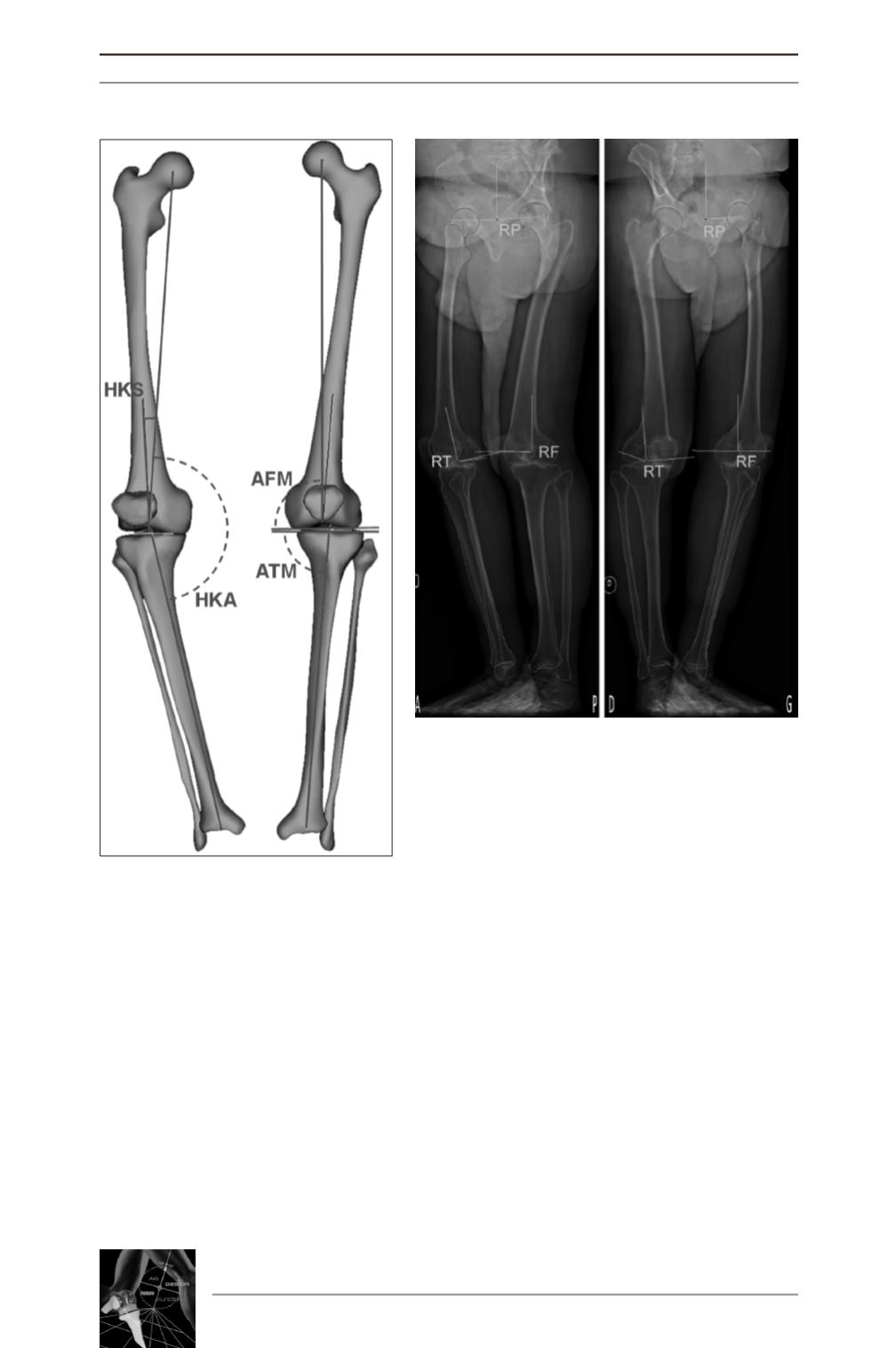
Fig. 2 : Référentiels de mesure utilisés. Référentiel
Patient (RP) : Origine = équidistante du centre des
deux têtes fémorales sur la droite les reliant ; Axe
proximo-distal Z = verticale par rapport au sol ; Axe
médio-latéral X = perpendiculaire à l’axe Z et situé
dans le plan comprenant le centre des deux têtes
fémorales ; Axe antéro-postérieur Y = perpendicu-
laire aux axes X et Z. Référentiel Fémur (RF) :
Origine = sur la droite reliant le centre des condyles
fémoraux postérieurs et équidistante des deux
intersections de la droite avec les surfaces fémo-
rales interne et externe ; Axe proximo-distal Z =
relie l’origine au centre de la tête fémorale ; Axe
médio-latéral X = perpendiculaire à l’axe Z et situé
dans le plan comprenant le centre des deux
condyles fémoraux postérieurs ; Axe antéro-posté-
rieur Y = perpendiculaire aux axes X et Z.
Référentiel Tibia (RT) : Axe proximo-distal Z = relie
le centre du pilon tibial au milieu des épines
tibiales ; Origine = sur l’axe Z, à son intersection
avec la surface tibiale proximale ; Axe médio-latéral
X = perpendiculaire à l’axe Z et parallèle dans le
plan transverse à la droite reliant les points les plus
postérieurs de l’épiphyse tibiale proximale en inter-
ne et en externe ; Axe antéro-postérieur Y = per-
pendiculaire aux axes X et Z.