















 47 / 76
47 / 76

MAITRISE ORTHOPEDIQUE
//
47
plateau tibial symétrique, il
est nécessaire de prendre en
considération 2 exigences des
prothèses modernes que sont
d’une part, les avantages du
positionnement en rotation
latérale et d’autre part, les spé-
cificités anthropomorphiques
de la relation dimensionnelle
entre le tibia proximal et le
fémur distal dans un marché
international.
Crockarell et coll.
(9)
ont évo-
qué le positionnement en rota-
tion latérale des composants
fémoraux et tibiaux dans le but
d’améliorer le course patellaire
et l’équilibrage ligamentaire en
flexion pour le fémur. Le choix
et les résultats d’une prothèse
à composant tibial asymétrique
avec 97 % de survie à 5 ans,
permet aux auteurs de fiabili-
ser cette option. En revanche,
l’excellente couverture tibiale
assurée par cette asymétrie
diminue la survenue et l’inci-
dence clinique des risques de
descellement par défaut de
qualité osseuse.
Enfin, une série récente de
mesures anthropométriques
intra-opératoires réalisée sur
703 genoux d’une population
de 566 patients japonais
(10)
met, par exemple, en évidence
l’intérêt majeur du composant
tibial asymétrique pour maxi-
miser la couverture tibiale
des patients issus du marché
asiatique. Erkocak en utilisant
une technique d’imagerie en
résonnance magnétique
(11)
fait
un constat équivalent pour la
population turque en insistant
aussi sur la nécessité de com-
posants tibiaux plus petits par
rapport aux gammes dévelop-
pées initialement pour le mar-
ché Nord-Américain.
4)
Alignement
mécanique
ou cinématique ?
L’alignement mécanique reste
la méthode aujourd’hui la plus
utilisée. Le principe est d’ob-
tenir un alignement de l’angle
HKA (Hip Knee Ankle) autour
de 180° à ± 3°. Les ancillaires
contemporains (à référence
intra ou extra médullaire) per-
mettent en général d’atteindre
cet objectif.
L’alignement cinématique est
d’origine plus récente dans
son utilisation. Il consiste à
conserver l’enveloppe origi-
nelle du genou, comme pour
une prothèse partielle. Ainsi,
on conserve la morphologie
native du genou ; la prothèse
venant se substituer au volume
osseux réséqué. Sa réalisation
n’est pas toujours très facile:
elle peut s’appuyer sur une
imagerie 3D préopératoire
(rotations, varus/valgus…).
(12)
En travaillant sur une nouvelle
PTG, il semblait utile de per-
mettre un alignement méca-
nique basé sur les 2 options
utilisées. L’alignement ciné-
matique ne nécessite pas un
design particulier de l’ancil-
laire mais un travail d’image-
rie en amont
(13)
. Par contre, la
prothèse utilisée doit pouvoir
s’adapter simplement à toutes
les techniques, ce qui est per-
mis par sa polyvalence et son
design anatomique.
A partir de l’analyse d’une
série consécutive de près de
1 500 radiographies en charge,
Gaillard a démontré
(14)
qu’un
défaut d’alignement peropéra-
toire du composant tibial était
corrélé à plusieurs facteurs de
risque liés à la fois au patient
et au chirurgien. La déforma-
tion préopératoire du membre
inférieur étant l’un des fac-
teurs les plus influents mais
aussi par définition l’un des
plus dépendants du chirur-
gien dans sa correction. Les
auteurs reconnaissent que l’ali-
gnement mécanique obtenu
par une coupe tibiale ortho-
gonale représente assurément
un objectif reproductible
qu’il faut privilégier. La pos-
sibilité d’associer une pente
tibiale postérieure de 3° dans
certaines indications peut se
résoudre simplement et dans le
respect du principe de la coupe
orthogonale par le biais d’un
bloc de coupe complémentaire
spécifique.
5)
Les exigences de la
postéro-substitution
La postéro-substitution d’une
PTG est utilisée depuis des
décennies. Malgré cela, on
constate encore aujourd’hui
des cas de subluxation ou luxa-
tion du PE. La « jumping dis-
tance » est un point capital du
dessin de l’implant.
La taille, la position et la forme
de la came sont fondamentales
(fig. 6). La modélisation par élé-
ments finis du comportement
de cette dernière en terme
de répartition et de pic de
Figure 6 : Le rayon de courbure est constant depuis l’hyper-extension (-5°) et jusqu’à
95° de flexion (en roulement pur). A partir de 95°, la cinématique est complétée par un
rayon de courbure moindre et postérieur, des condyles sur la surface articulaire, associé à
un enroulement du « diabolo » de la cage fémorale sur la face postérieure de la came de
postéro-stabilisation.
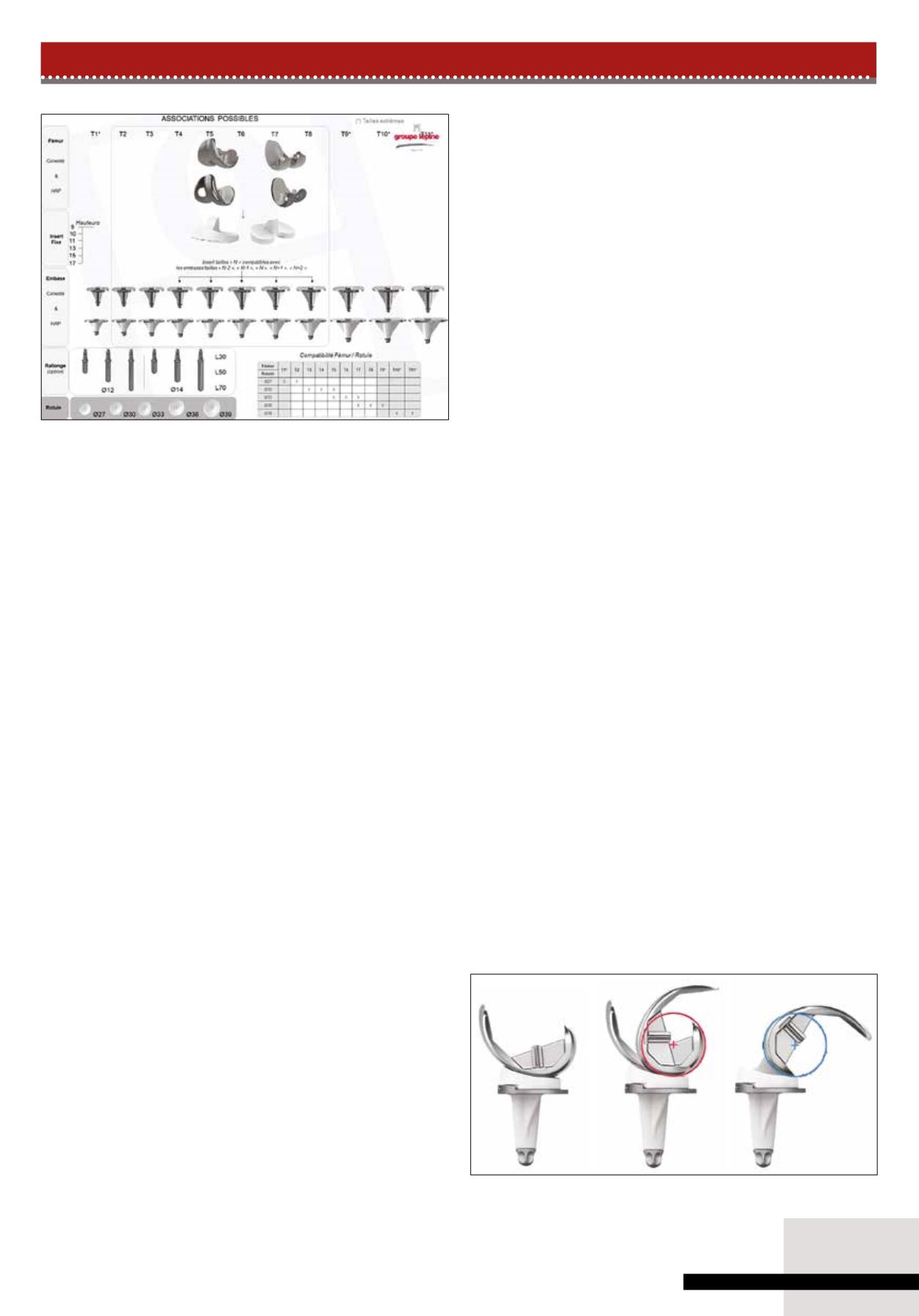
Figure 5 : tailles et associations possibles de la prothèse totale de genou à plateau fixe
KNEO (groupe Lépine – France).
contraintes résiduelles lors de
la flexion a validé que la surface
de contact était la plus étendue
lors de l’hyper-extension et
restait relativement constante
lors d’une flexion neutre. Une
latitude de rotation médiale
d’environ 10° pendant la
flexion peut être envisagée pour
améliorer la cinématique arti-
culaire, particulièrement pour
les genoux déformés en varus
(15)
. C’est principalement lors
de la flexion en rotation (auto-
risée par une légère dépouille
angulaire des faces médio-laté-
rales de la cage fémorale) que
les contraintes résiduelles et les
pics de contraintes gagnent à
se répartir sur une surface de
contact la plus étendue possible.
Watanabe
(16)
en comparant les
contraintes de von Mises à 90°
et 120° de flexion, de deux des-
sins de came de postéro-subs-
titution ne différant que par
sa forme arrondie ou plane,
démontre l’intérêt majeur d’une
came aux contours arrondis
pour réduire significativement
les contraintes transmises au
polyéthylène lors de la flexion
associée à une rotation médiale
de 10°. Une came conique
pourrait permettre un roll-back
fémoral latéral plus important
comme c’est le cas physiologi-
quement (pivot médial).
La cage a bien entendu la
même importance. Le but est
de permettre le roll-back phy-
siologique sans sacrifice osseux
exagéré. La cage doit pouvoir
être réalisée sur l’implant d’es-
sai qui permettra sans perte
de temps d’effectuer les essais
avec la pièce tibiale d’essai. Ceci
permet rapidement d’évaluer la
course patellaire et d’avoir une
BIOMÉCANIQUE